Method of direct manipulation and conditions for acoustic tweezers grasping Medaka
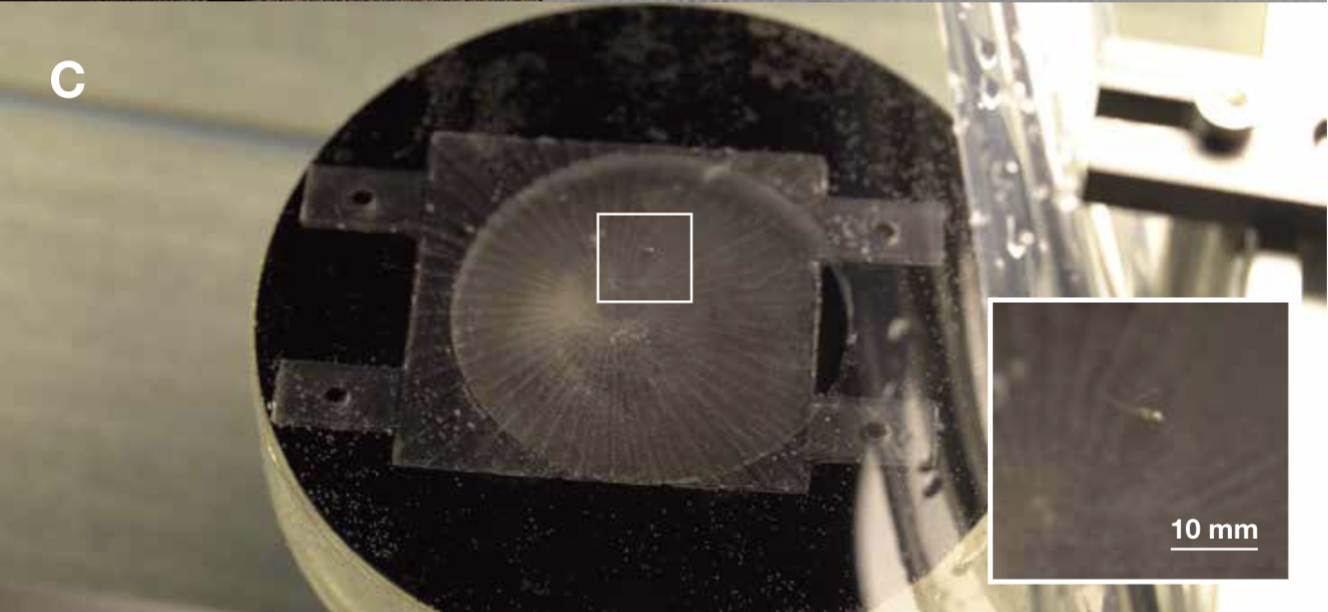
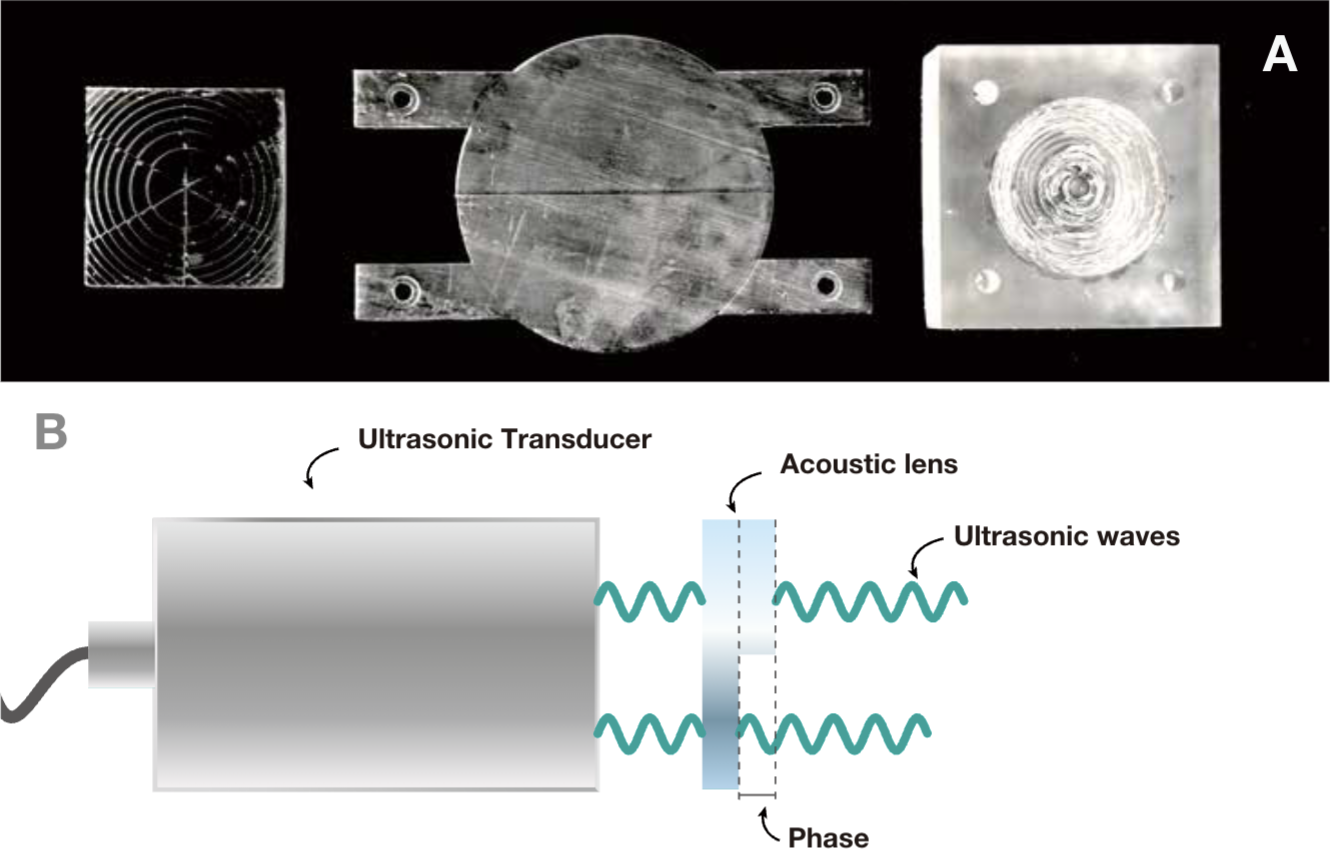
This study investigates the generation of an underwater sound field for grasping and manipulating small live fish using an acoustic lens–based approach. The aim was to examine the feasibility and experimental conditions required to trap and move living organisms underwater. To this end, we conducted experiments using underwater ultrasonic transducers in combination with 3D-printed acoustic lenses to manipulate objects larger than those handled in previous acoustic trapping studies.
An acoustic vortex (AV) method was adopted because it enables trapping without high-speed phase switching. AVs employ orbital angular momentum (OAM) of sound waves to form vortical fields capable of three-dimensional trapping. Based on the method proposed by Marzo et al. (2016), we reproduced the phase distribution in MATLAB and designed an acoustic trap that accounts for the density contrast between the lens material and the surrounding fluid.
Two types of ultrasonic transducers were used: a high-intensity focused ultrasound (HIFU) transducer and a phased array (PA) transducer. The HIFU provides higher acoustic power, whereas the PA offers finer focal control. Both horizontal and vertical configurations were tested in a water tank. In horizontal experiments, 80 Vpp was applied to HIFU and 50 Vpp to PA; in vertical experiments, 50 Vpp and 25 Vpp were used, respectively.
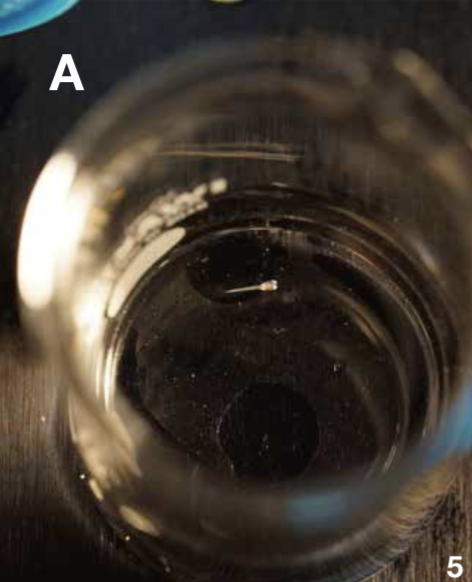
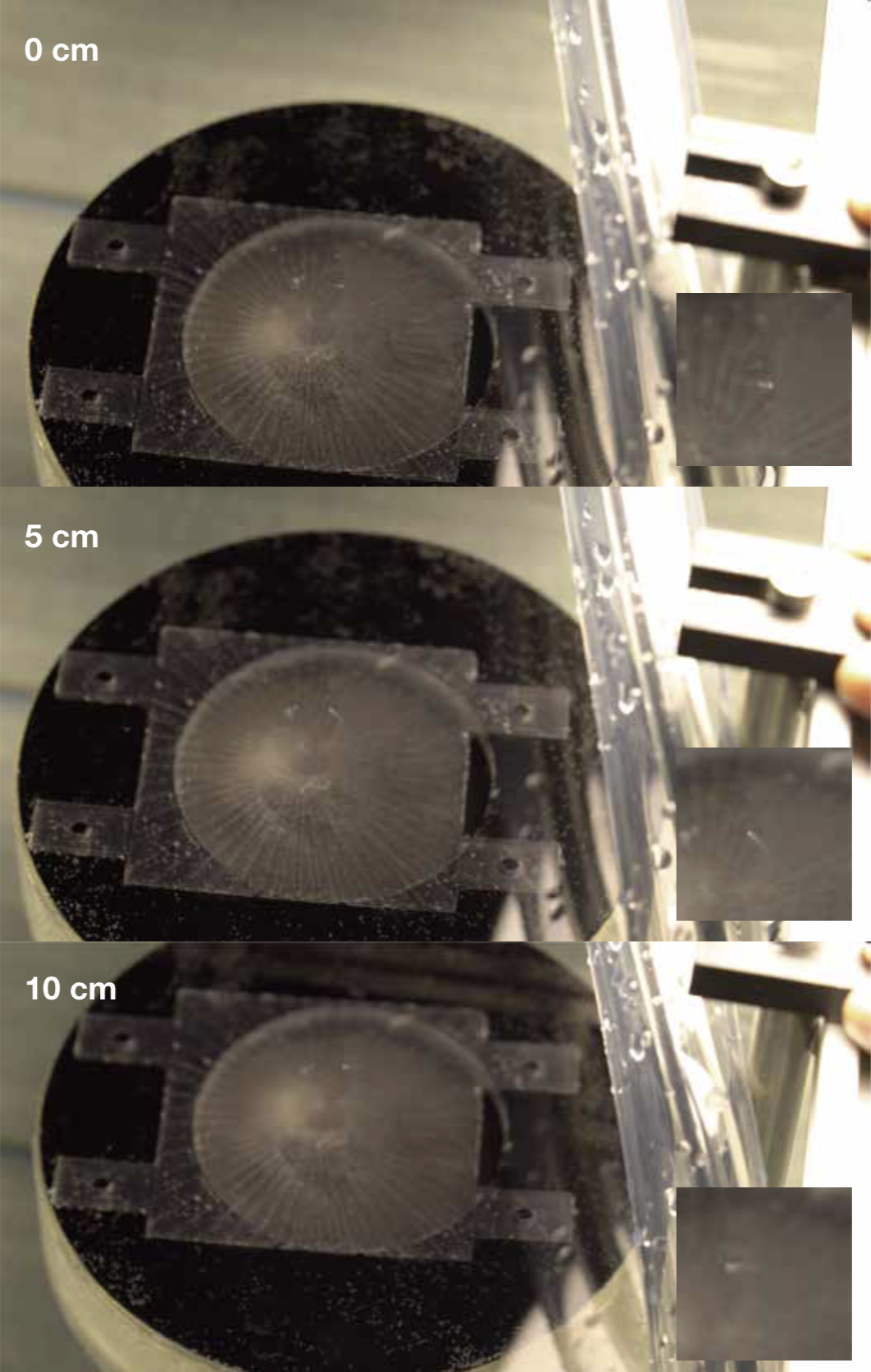
In artificial-object trials, both transducers successfully trapped lightweight Styrofoam particles under vertical excitation. In subsequent biological trials, HIFU alone was able to transiently trap medaka (Oryzias latipes) larvae up to 8 mm in length, which exceeds the object size range reported in previous AV-based studies (e.g., AV48).
These results suggest that acoustic lens-assisted vortical fields can be used to trap and manipulate small live organisms under specific acoustic conditions. While the present work does not yet demonstrate long-term or precise control, it provides an initial empirical basis for extending acoustic manipulation to larger or living targets. This approach may contribute to the development of practical underwater acoustic tweezers and broaden the applications of ultrasonic manipulation in biological research and environmental monitoring.