Microfluidic platform using focused ultrasound passing through hydrophobic meshes with jump availability
ジャンプ能力があるマイクロ流体プラットフォームの撥水メッシュを透過する集束超音波による実現
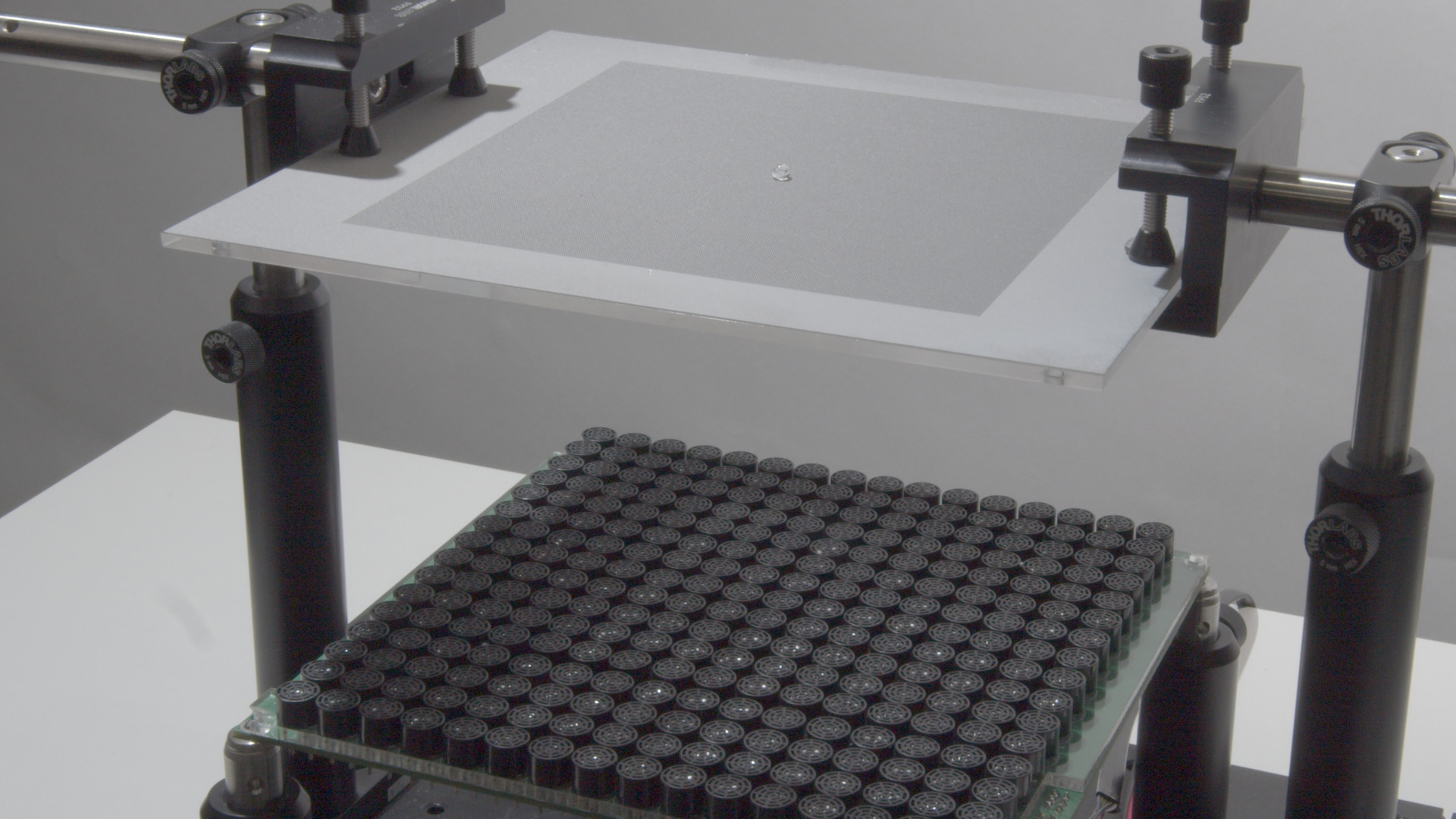
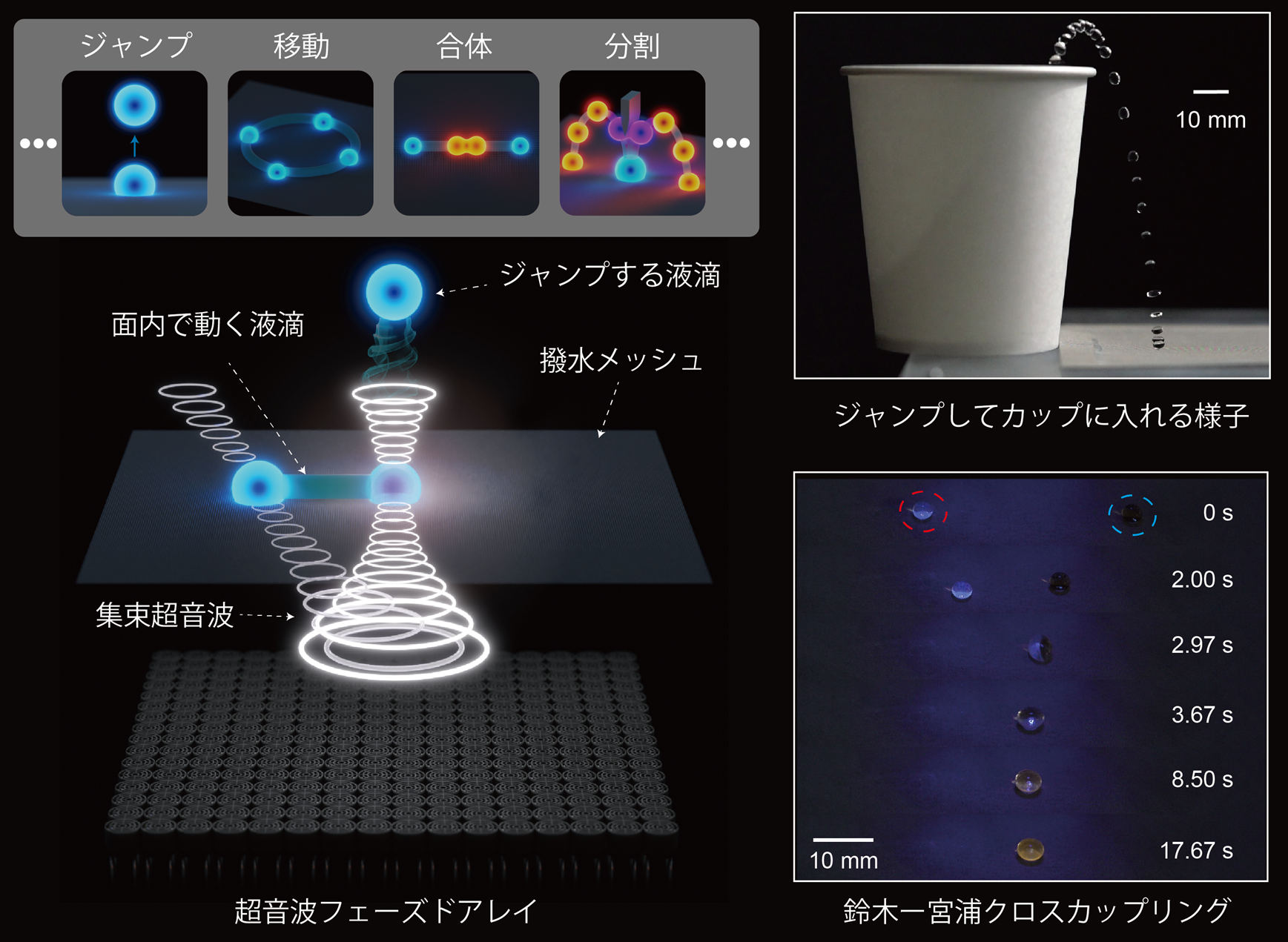
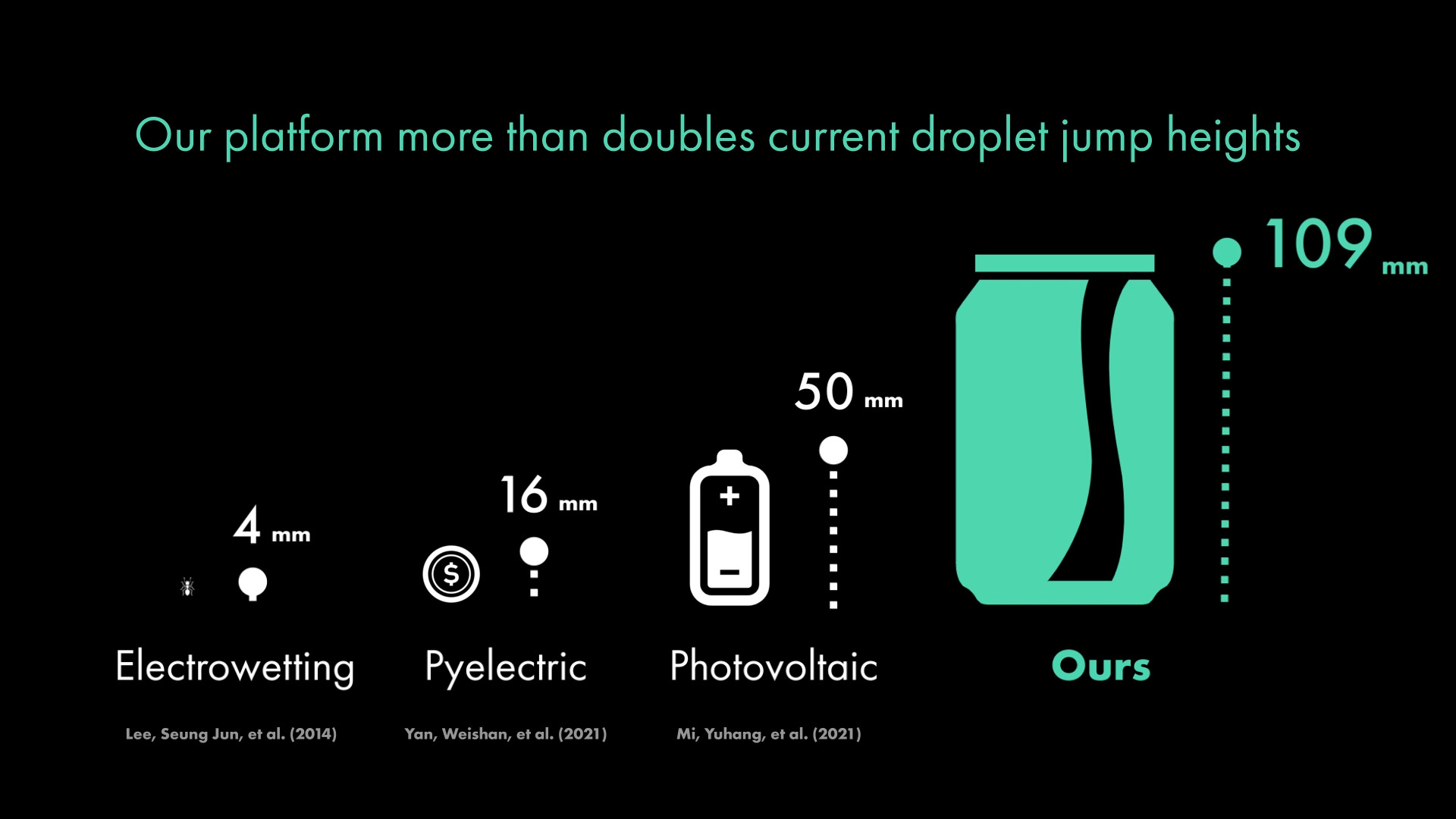
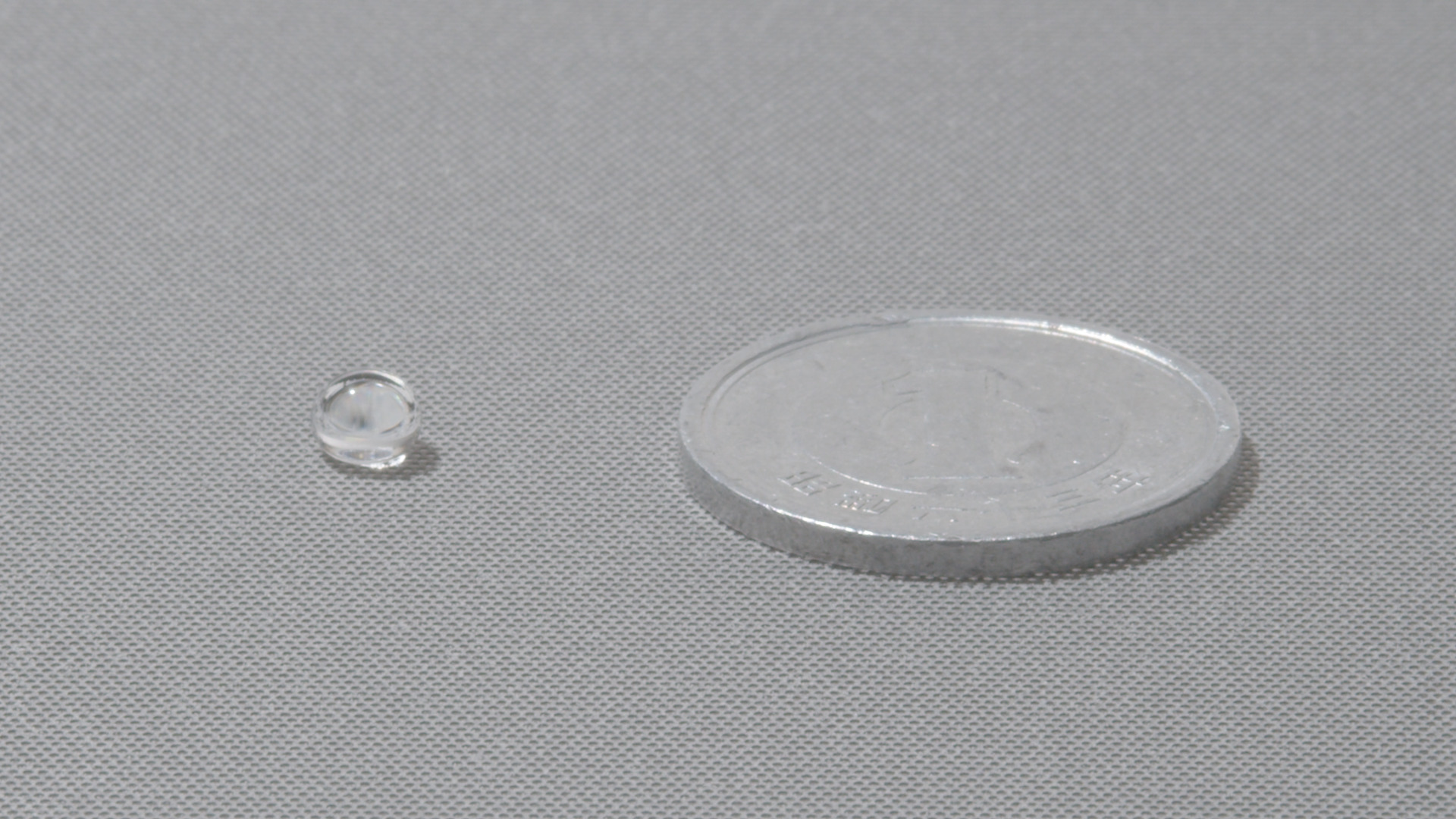
Applications in chemistry, biology, medicine, and engineering require the large-scale manipulation of a wide range of chemicals, samples, and specimens. To achieve maximum efficiency, parallel control of microlitre droplets using automated techniques is essential. Electrowetting-on-dielectric (EWOD), which manipulates droplets using the imbalance of wetting on a substrate, is the most widely employed method. However, EWOD is limited in its capability to make droplets detach from the substrate (jumping), which hinders throughput and device integration. Here, we propose a novel microfluidic system based on focused ultrasound passing through a hydrophobic mesh with droplets resting on top. A phased array dynamically creates foci to manipulate droplets of up to 300 µL. This platform offers a jump height of up to 10 cm, a 27-fold improvement over conventional EWOD systems. In addition, droplets can be merged or split by pushing them against a hydrophobic knife. We demonstrate Suzuki-Miyaura cross-coupling using our platform, showing its potential for a wide range of chemical experiments. Biofouling in our system was lower than in conventional EWOD, demonstrating its high suitability for biological experiments. Focused ultrasound allows the manipulation of both solid and liquid targets. Our platform provides a foundation for the advancement of micro-robotics, additive manufacturing, and laboratory automation.
科学実験の自動化・高速化において、ピコリットル〜マイクロリットル程度の少量の液体(液滴)を並列的に扱う必要が生じる場合があります。また、液滴を空間的に離れた基盤装置・容器へ移動させる際には、液滴をジャンプさせる必要がありますが、平面上で液滴を操作するデジタルマイクロ流体技術では、最大で5 mm程度の高さに限られていました。 本研究では、超音波の遠隔力(音響放射力)を利用して液滴を操作する新たなマイクロ流体基盤を開発しました。撥水加工を施したメッシュを用いると、音波を透過させつつ、液滴を支えることができ、空中でも音圧が高いところに液滴が引き寄せられる性質があることを見いだし、超音波ビームによってメッシュ上の液滴の操作が可能になりました。 これにより、液滴のジャンプの高さは最高で128 mmにまで達します。ジャンプする方向も制御できるため、液滴を隣の装置や別の段に移動させることも可能だと考えられます。また、デジタルマイクロ流体基盤に必要な基本的な機能として、複数の液滴の水平移動、合体、分割を実現しました。さらに、科学実験への適用例として、この基盤上で鈴木・宮浦クロスカップリング反応を実施するとともに、生物実験にも適していることを示しました。本研究成果により、立体ディスプレイや実験自動システムなどの開発が期待されます。
Yusuke Koroyasu, Thanh-Vinh Nguyen, Shun Sasaguri, Asier Marzo, Iñigo Ezcurdia, Yuuya Nagata, Tatsuya Yamamoto, Nobuhiko Nomura, Takayuki Hoshi, Yoichi Ochiai, Tatsuki Fushimi
頃安祐輔, グェン タン・ヴィン, 笹栗峻, Asier Marzo, Iñigo Ezcurdia, 長田裕也, 山本達也, 野村暢彦, 星貴之, 落合陽一, 伏見龍樹

[Tsukuba Journal] 空中超音波で液滴をジャンプさせるマイクロ流体操作基盤を開発 2023.07.21
Press Release PDF資料 [6.1MB]