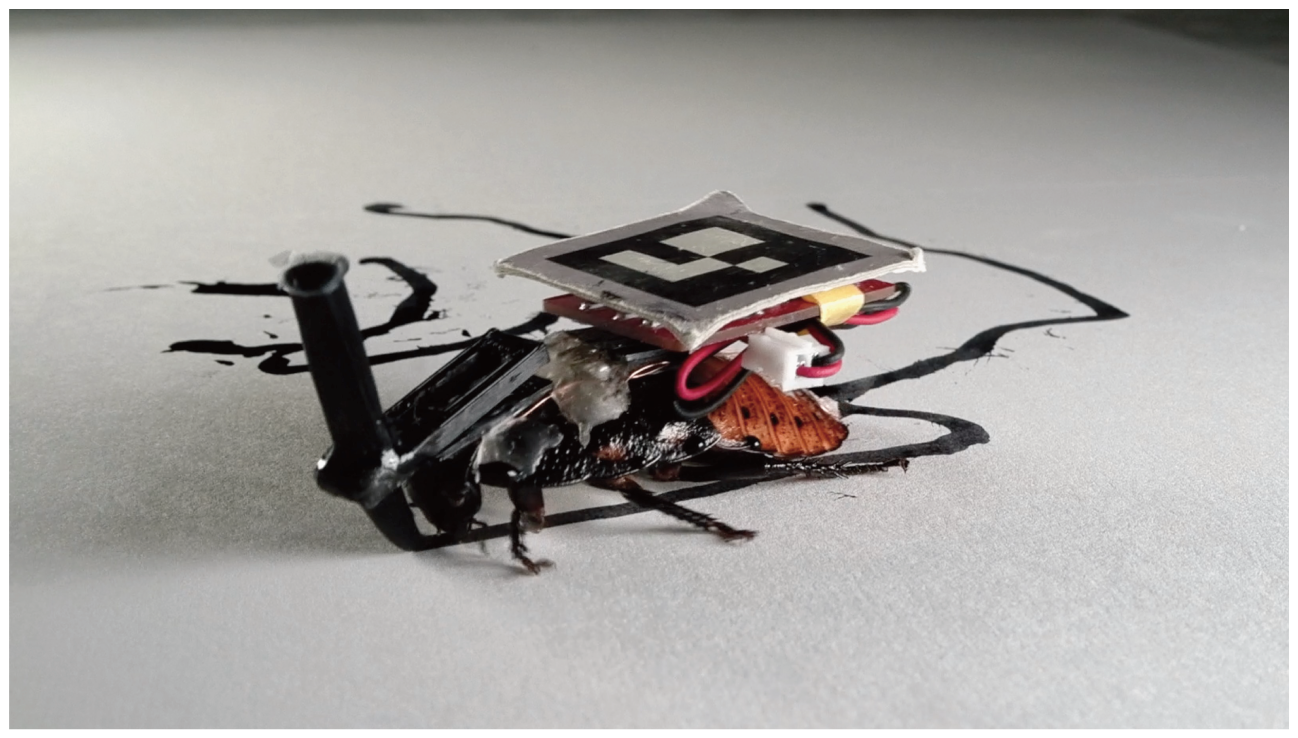
We propose “Calmbots” that is a novel user interface utilizing insects’ capabilities such as mobility, self-maintenance, and hiding. In Calmbots, we utilize Madagascar cockroach and control multiple cockroaches by electrical stimulation to use them as display (by making them as pixels) and object transportation, or make them attach pens for drawing lines. Further, Calmbots can be used as input or haptic interfaces or audio device. We make the following novelties. First, we controlled Madagascar cockroaches with high mobility of moving across walls, carpets, and the floor with cables, where robots are difficult to achieve. Second, we devised option parts attached to cockroaches, making them capable of drawing lines and transporting objects. Third, we controlled multiple cockroaches effectively by developing the control based on the principle of worker ants, which exists in a swarm of ants. When there appear out-of-control cockroaches, we utilized the substitute cockroaches to continue the ongoing task.
本研究では、昆虫の持つ移動能力、自己維持能力、隠れる能力を利用した斬新なユーザーインターフェースである「Calmbots」を提案する。Calmbotsでは,マダガスカルゴキブリを利用し,複数のゴキブリを電気刺激で制御することで,ゴキブリをディスプレイ(画素化)や物体の移動に利用したり,ペンを装着して線を引かせたりすることができる。さらに、Calmbotsを入力や触覚インターフェースやオーディオデバイスとして利用することも可能である。私たちは以下のような工夫をしている.第一に,ロボットでは困難な壁やカーペット,床などをケーブルで移動する高い機動性を持つマダガスカルゴキブリを制御した。第二に、ゴキブリにオプションパーツを取り付けて、線を引いたり、物を運ぶことができるように工夫した。第三に、アリの群れの中に存在する働きアリの原理に基づいた制御を開発し、複数のゴキブリを効果的に制御した。制御できないゴキブリが出現した場合には、代用ゴキブリを利用して継続的に作業を行える。



Yuga Tsukuda, Tagami Daichi, Masaaki Sadasue, Shieru Suzuki, Jun-Li Lu, Yoichi Ochiai
佃優河、田上大智、貞末真明、鈴木紫琉、盧俊利、落合陽一
Citation/引用
@tsuku{Calmbots2020,
author = {Yuga Tsukuda},
title = {Calmbots},
note = {\url{https://digitalnature.slis.tsukuba.ac.jp/2020/10/calmbots/}},
year = {2020},
month = {October}
}